Le 21 juin, lors du 2025 SMM (4e) Congrès sur les systèmes de propulsion électrique et Forum de l'industrie des moteurs de propulsion - Forum sur les systèmes de propulsion électrique eVTOL, organisé conjointement par SMM Information & Technology Co., Ltd., Hunan Hongwang New Material Technology Co., Ltd., le Gouvernement populaire du district de Louxing et la Zone économique et technologique nationale de Loudi, Cao Hongfei, cofondateur/directeur général d'Anhui EVK Motor Technology Co., Ltd., a partagé ses connaissances sur la « Technologie des moteurs d'entraînement à hélice à fil plat haute performance EVK ».

1. Caractéristiques des moteurs de groupe motopropulseur pour les aéronefs à basse altitude
►Classification des groupes motopropulseurs eVTOL :
• Rotor pur : rotor simple couche, rotors doubles couches supérieur et inférieur ;
• Aile composite ;
• Aile composite à rotors inclinables.
►Système d'hélice électrique
Résumé :
1. Il existe diverses formes de systèmes de propulsion, et aucune ne peut être considérée comme une tendance inévitable à l'heure actuelle.
2. Les moteurs d'hélices de sustentation sont généralement des moteurs à rotor externe ; les moteurs de voies de vol sont généralement des moteurs à rotor interne.
3. Les moteurs et les systèmes d'hélices sont directement intégrés, et il n'existe aucun précédent d'intégration des moteurs et des contrôleurs électroniques.
1. Caractéristiques de charge et exigences techniques des moteurs d'hélices pour les aéronefs à basse altitude
►Exigences techniques et caractéristiques des moteurs d'hélices :
a. Selon les caractéristiques de charge de l'hélice : aucune exigence d'affaiblissement de champ à puissance constante pour le moteur d'entraînement, et la présence ou l'absence d'un rapport de couple de reluctance est sans importance.
b. La plage de vitesses du moteur est étroite ; en général, la vitesse maximale est inférieure à 1,4 fois la vitesse nominale.
c. En raison de la résistance des pales de l'hélice et de l'exigence que leur vitesse linéaire soit inférieure à la vitesse du son, la vitesse de fonctionnement du moteur d'entraînement est relativement faible.
d. Le moteur d'entraînement pour les aéronefs à basse altitude est généralement directement relié à l'hélice, ce qui peut améliorer la fiabilité du système, et une dimension axiale plus courte est généralement choisie pour le moteur d'entraînement.
e. Dans le cadre où la fréquence du contrôleur du moteur est contrôlable, augmenter le nombre de paires de pôles autant que possible peut réduire efficacement l'épaisseur des carcasses de stator et de rotor et diminuer les dimensions des enroulements d'extrémité des bobinages du moteur. Compte tenu de leur vitesse de fonctionnement relativement basse, les moteurs ont généralement un nombre plus élevé de paires de pôles, et un schéma d'enroulement à aimants permanents concentrés est généralement choisi.
f. Compte tenu des exigences élevées en matière de fiabilité des moteurs d'hélices (en particulier pour les modèles habités), la conception des groupes motopropulseurs concernés accorde généralement la priorité à la réduction des taux de défaillance ou à la fourniture de fonctions redondantes.
►Résumé des caractéristiques
• Caractéristiques de charge : lorsque la vitesse augmente, l'indice de couple augmente. La plage de vitesse de fonctionnement effective des moteurs d'hélices d'avions est beaucoup plus étroite que celle des moteurs automobiles.
• Caractéristiques d'efficacité : la plage de vitesse de haut rendement dans le système d'hélices est relativement étroite.
• Les moteurs présentant cette caractéristique ne peuvent pas utiliser l'affaiblissement du champ pour augmenter la vitesse afin de répondre aux exigences de haute vitesse et de couple élevé, de sorte que la force contre-électromotrice du moteur est généralement inférieure à la tension de fonctionnement.
• Il faut mettre en œuvre de bonnes solutions pour les pertes PWM dans le moteur !
La densité couple-poids des moteurs d'entraînement d'hélices est cruciale, équivalente au rapport poussée-poids des moteurs à réaction.
► Sélection des structures à rotor interne et externe
♦ Avantages et inconvénients des rotors internes
• Avantages : structure simple (y compris support de roulement, conception des fils de sortie, conception d'étanchéité, etc.) ; grande surface de dissipation thermique sur la circonférence extérieure du stator, permettant une charge électrique plus élevée ; le rotor est à l'intérieur du stator, avec un moment d'inertie faible, adapté aux entraînements servo ; l'épaisseur du rotor n'est généralement pas sensible, permettant des conceptions de circuits magnétiques plus complexes.
• Inconvénients : le diamètre de l'entrefer est relativement petit, ce qui n'est pas favorable à l'augmentation de la densité de couple ; la dissipation thermique du rotor est relativement difficile, et le coût de l'acier magnétique est relativement élevé.
♦ Avantages et inconvénients des rotors externes
• Avantages : grand diamètre de l'entrefer, facilitant l'obtention d'une densité de couple plus élevée ; dissipation thermique du rotor pratique ; protection simple de l'acier magnétique, sans préoccupations concernant les contraintes centrifuges.
• Inconvénients : conception structurelle difficile (y compris conception d'étanchéité, conception de dissipation thermique) ; grand moment d'inertie et force centrifuge du rotor, non adapté aux applications à très haute vitesse.
Il a également présenté Shanghai EVK Motor Technology Co., Ltd., également connue sous le nom d'EVK.
3. La technologie de bobinage concentré à fil plat d'EVK
Les moteurs à fil plat sont plus adaptés aux avions électriques
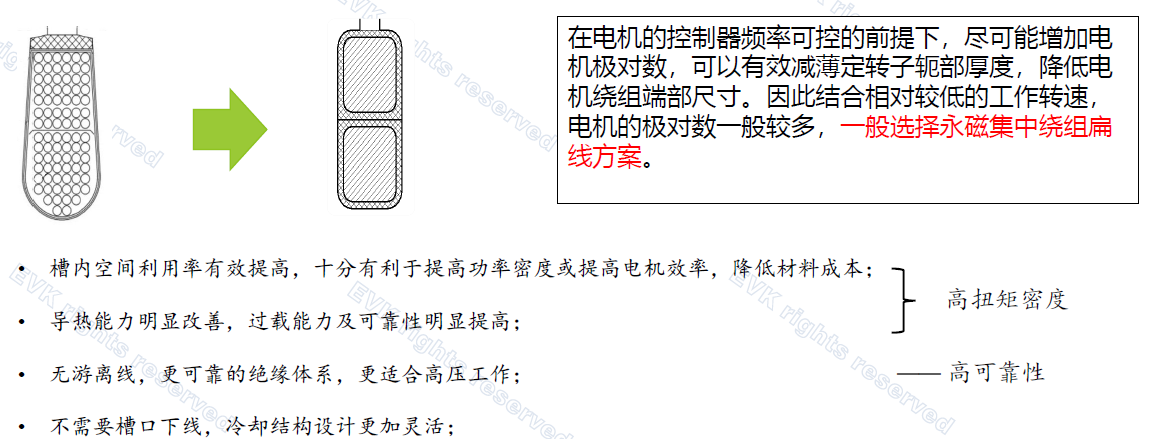
Dans la mesure où la fréquence du contrôleur du moteur est contrôlable, augmenter autant que possible le nombre de paires de pôles peut réduire efficacement l'épaisseur des culasses de stator et de rotor ainsi que les dimensions d'extrémité des bobinages du moteur. Par conséquent, combinés à des vitesses de fonctionnement relativement basses, les moteurs ont généralement un nombre plus élevé de paires de pôles, et la solution de bobinage concentré à fil plat avec aimants permanents est généralement choisie.
Il a détaillé le moteur à bobinage concentré en forme de peigne breveté d'EVK.
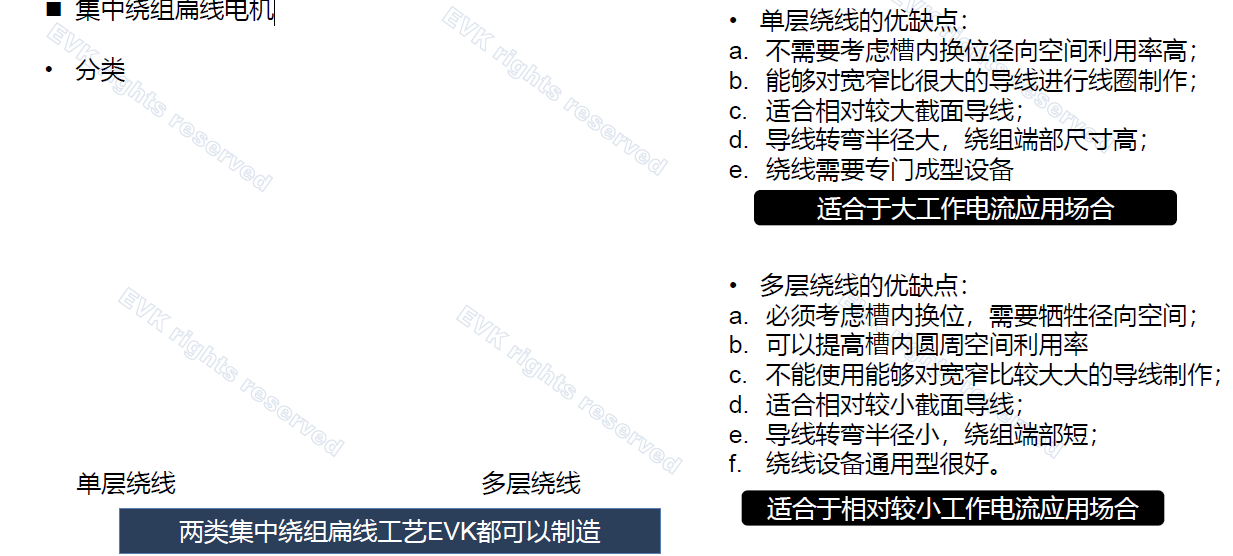
► Moteurs à bobinage concentré à fil plat
En outre, il a partagé des informations sur la manière dont les rotors externes + les fils plats peuvent équilibrer la densité de couple et le coût, le procédé de matrice en acier magnétique Halbach d'EVK, la technologie de refroidissement direct par bobinage d'EVK, une présentation des produits et technologies de moteurs à hélice d'EVK, ainsi que des lignes de production de moteurs à hélice d'EVK.
》Cliquez pour consulter le rapport spécial du 2025 SMM (4ème) Electric Drive System Conference & Drive Motor Industry Forum



